Autonomous Car
For the final project for my mechatronics design course, we had to build and program a robotic car that could navigate a path both manually and autonomously. The car had to be built from scratch (not from a kit or purchased parts) and had to use sensors and motors from an Arduino kit. The car was required to complete 3 tasks:
1. Manually navigate a path using a joystick.
2. Autonomously navigate the same path.
3. Autonomously avoid an obstacle on a path and return to the intended path.
Performance of the car was evaluated based on the design quality, speed, and accuracy.
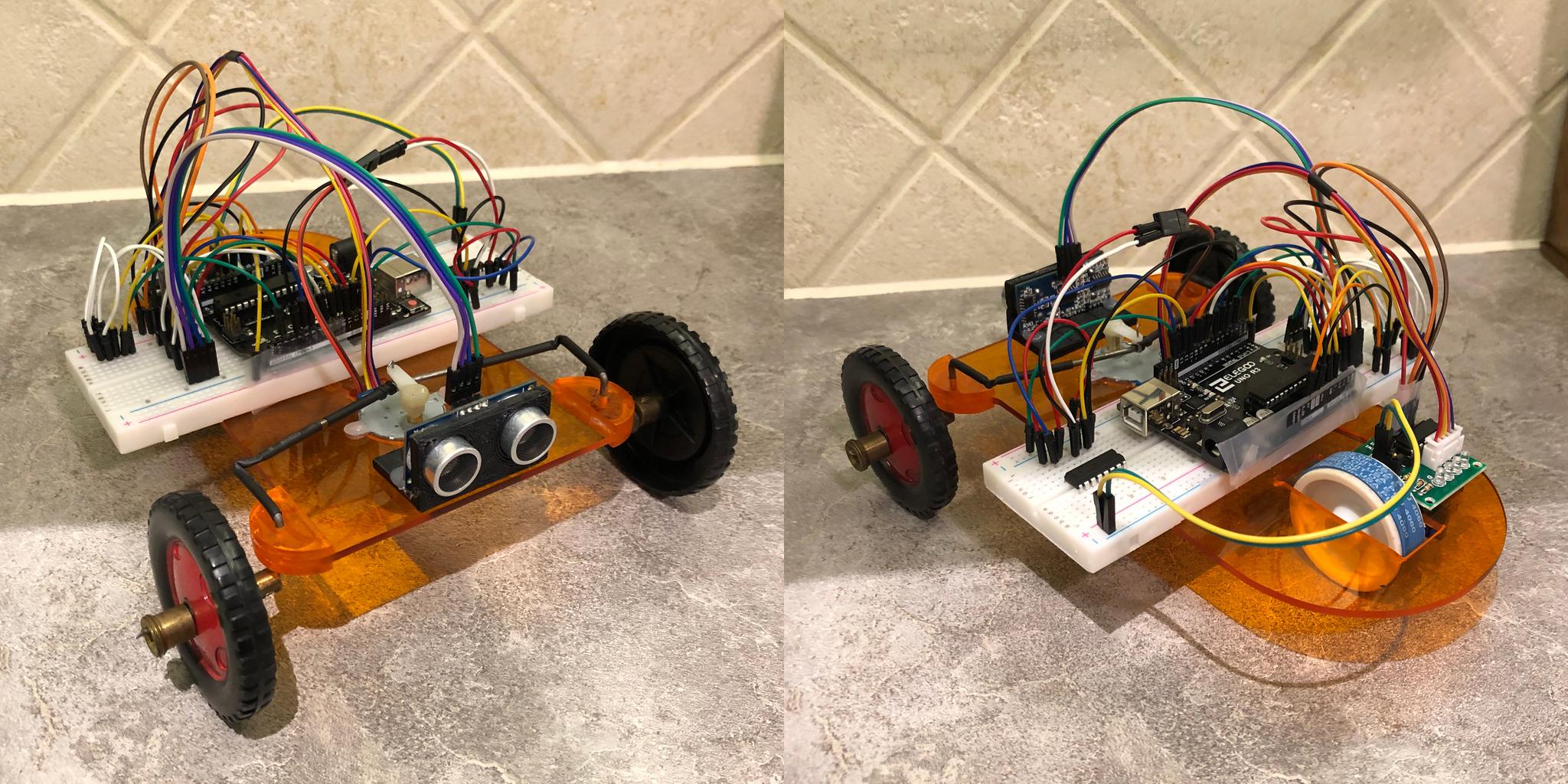
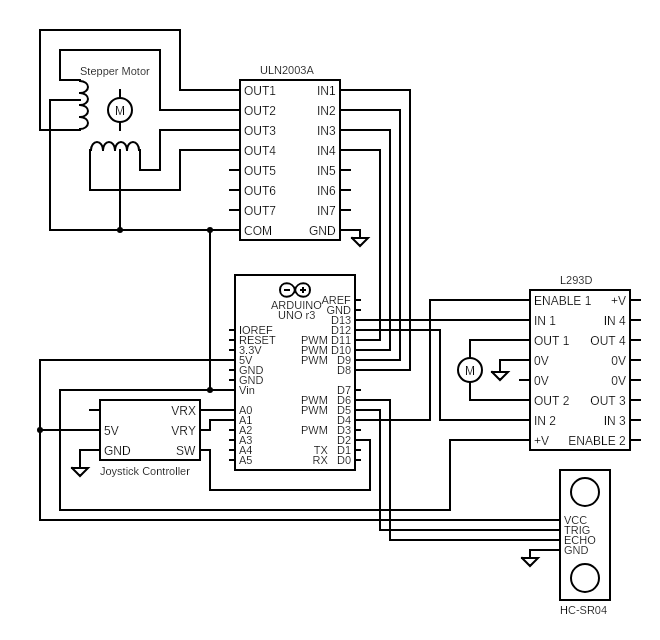
The car was first modelled in Solidworks, then the frame was cut from acrylic using the CAD model as a template. A DC motor was used to power the car forwards, and a stepper motor was used for steering.
The car was programmed as a group. Github was used to collaborate when programming the cars: https://github.com/heatherwubs/MEC830-Project2
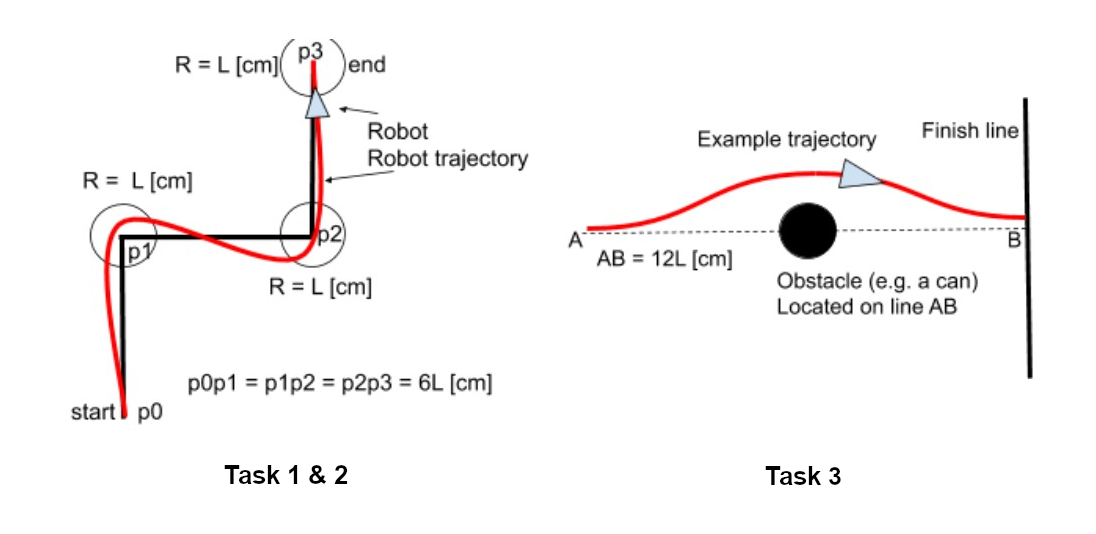
Task 1 was achieved by using a joystick to navigate the path.
Task 2 was achieved by programming the car to move forward a pre-set distance before making each turn.
Task 3 was achieved by using an ultrasonic sensor to detect an object in the car's path, and then running an avoidance program to move around the object once detected.
The car was able to accomplish each task within the allowable error margin. Batteries did not provide enough reliable power for the system, so a power cable had to be used while the car moved.
